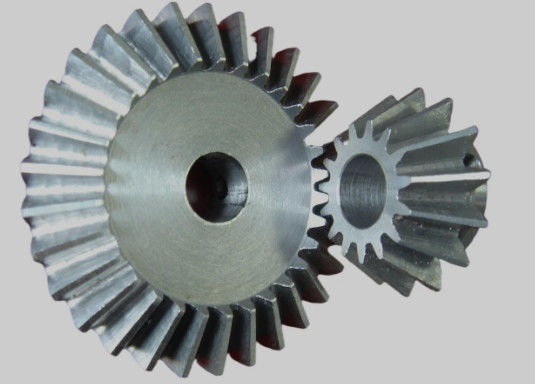
Schiefe Bevel-Gangkronen Radspinne für Turmkrane Geschwindigkeitsreduktion
Die in Kränen verwendeten Schrägräder haben folgende Eigenschaften, um ihren besonderen Anforderungen an die Arbeitsumgebung und die Leistung zu entsprechen:
-
Hohe Festigkeit:Krane müssen häufig während des Betriebs mit schweren Lasten umgehen, daher müssen Schrägräder aus hochfesten Materialien wie Legierstahl oder gehärtetem Stahl hergestellt werden,um sicherzustellen, dass sie hohem Drehmoment und Schlaglast standhalten.
-
Verschleißfestigkeit:Aufgrund des ständigen Gebrauchs und der häufigen An- und Stillstände des Krans müssen die Schrägräder eine hohe Verschleißfestigkeit aufweisen, um ihre Lebensdauer zu verlängern.
-
Genauigkeit:Krane erfordern eine präzise Bewegungssteuerung beim Betrieb, so dass die Fertigungstoleranzen von Schräggetüten sehr gering sein müssen, um eine reibungslose und genaue Übertragung zu gewährleisten.
-
ZuverlässigkeitBei schweren Geräten wie Kränen kann ein Ausfall zu kostspieligen Stillstandszeiten und potenziellen Sicherheitsrisiken führen.Schräggetriebe müssen eine hohe Zuverlässigkeit aufweisen, um die Häufigkeit von Störungen und Reparaturen zu reduzieren..
-
Korrosionsbeständigkeit:Krane können in rauen Umgebungen arbeiten, einschließlich hoher Feuchtigkeit, chemischer Exposition oder Meeresumgebungen.Umweltschäden müssen durch Korrosionsbeständigkeit verhindert werden..
-
Größe und Gewicht:Um die Beweglichkeit und Effizienz des Krans zu verbessern, sollte die Konstruktion des Schrägrads so kompakt wie möglich sein und gleichzeitig eine ausreichende Festigkeit und Langlebigkeit gewährleisten.
-
Geräusch- und Vibrationskontrolle:Bei Kranbetrieben beeinträchtigen übermäßige Geräusche und Vibrationen nicht nur den Komfort des Bedieners, sondern können auch auf Probleme mit der Antriebsleitung hinweisen.Schrägradgeräte sollten so konzipiert und hergestellt werden, dass Geräusche und Vibrationen verringert werden.
Diese Eigenschaften sorgen dafür, daß die in Kränen verwendeten Schrägräder unter anspruchsvollen Betriebsbedingungen zuverlässig arbeiten.
| Wie hoch? |
偏 差 |
端面模数 |
| 0.6 ¥1 ¥1 ¥1 |
1 ′′ 1.6 ′′ 轮 |
1.6 ∙ 2.5 ∙ Räder |
| 节圆直径 ((mm) |
|
Mehr als 3
6以下
|
超过6到2以下 |
超过12到25以下 |
超过25到50以下 |
超过50到100以下 |
超过100到200以下 |
über 6 bis 12 Jahre |
超过12到25以下 |
超过25到50以下 |
超过50到100以下 |
超过100到200以下 |
Über 200 bis 400 |
超过12到25以下 |
超过25到50以下 |
超过50到100以下 |
超过100到200以下 |
Über 200 bis 400 |
Über 400 bis 800 |
| 0 |
单 距偏差 (±) |
4 |
4 |
4 |
4 |
5 |
5 |
4 |
4 |
4 |
5 |
5 |
6 |
4 |
4 |
5 |
5 |
6 |
6 |
| Nähe 距差 |
5 |
5 |
5 |
5 |
6 |
6 |
5 |
5 |
6 |
6 |
7 |
7 |
5 |
6 |
6 |
7 |
8 |
8 |
| ¥ Abstandsdifferenz (±) |
14 |
15 |
16 |
17 |
18 |
20 |
15 |
16 |
17 |
19 |
20 |
22 |
17 |
18 |
19 |
21 |
23 |
26 |
| 径 Richtung Sprung Verzerrung |
5 |
7 |
10 |
14 |
20 |
28 |
7 |
10 |
14 |
20 |
28 |
40 |
10 |
14 |
20 |
28 |
40 |
56 |
| 1 |
单 距偏差 (±) |
6 |
7 |
7 |
7 |
8 |
9 |
7 |
7 |
8 |
8 |
9 |
10 |
7 |
8 |
8 |
9 |
10 |
11 |
| Nähe 距差 |
8 |
9 |
9 |
10 |
10 |
11 |
9 |
9 |
10 |
11 |
11 |
13 |
10 |
10 |
11 |
12 |
13 |
14 |
| ¥ Abstandsdifferenz (±) |
25 |
26 |
28 |
30 |
32 |
34 |
27 |
29 |
30 |
32 |
35 |
39 |
30 |
32 |
34 |
36 |
40 |
44 |
| 径 Richtung Sprung Verzerrung |
7 |
10 |
15 |
21 |
30 |
43 |
10 |
15 |
21 |
30 |
43 |
60 |
15 |
21 |
30 |
43 |
60 |
86 |
| 2 |
单 距偏差 (±) |
12 |
12 |
13 |
13 |
14 |
15 |
12 |
13 |
14 |
14 |
16 |
17 |
13 |
14 |
15 |
16 |
17 |
19 |
| Nähe 距差 |
15 |
16 |
16 |
17 |
18 |
20 |
16 |
17 |
18 |
19 |
20 |
22 |
17 |
18 |
19 |
21 |
23 |
25 |
| ¥ Abstandsdifferenz (±) |
46 |
48 |
50 |
53 |
57 |
61 |
49 |
52 |
54 |
58 |
62 |
68 |
54 |
56 |
60 |
64 |
69 |
76 |
| 径 Richtung Sprung Verzerrung |
11 |
15 |
22 |
31 |
45 |
63 |
15 |
22 |
31 |
45 |
63 |
89 |
22 |
31 |
45 |
63 |
89 |
125 |
| 3 |
单 距偏差 (±) |
|
|
|
|
|
|
23 |
23 |
25 |
26 |
28 |
30 |
24 |
25 |
27 |
28 |
31 |
33 |
| Nähe 距差 |
|
|
|
|
|
|
29 |
30 |
32 |
34 |
36 |
39 |
31 |
33 |
35 |
37 |
40 |
43 |
| ¥ Abstandsdifferenz (±) |
|
|
|
|
|
|
90 |
94 |
98 |
105 |
110 |
120 |
97 |
100 |
105 |
115 |
120 |
135 |
| 径 Richtung Sprung Verzerrung |
16 |
24 |
33 |
48 |
67 |
95 |
24 |
33 |
48 |
67 |
95 |
135 |
33 |
48 |
67 |
95 |
135 |
190 |
| 4 |
单 距偏差 (±) |
|
|
|
|
|
|
41 |
42 |
44 |
46 |
49 |
52 |
43 |
45 |
47 |
50 |
55 |
57 |
| Nähe 距差 |
|
|
|
|
|
|
53 |
55 |
57 |
60 |
63 |
68 |
56 |
58 |
61 |
65 |
69 |
75 |
| ¥ Abstandsdifferenz (±) |
|
|
|
|
|
|
165 |
170 |
175 |
185 |
195 |
210 |
170 |
180 |
190 |
200 |
210 |
230 |
| 径 Richtung Sprung Verzerrung |
25 |
35 |
50 |
71 |
100 |
145 |
35 |
50 |
71 |
100 |
145 |
200 |
50 |
71 |
100 |
145 |
200 |
290 |
| 5 |
Nähe 距差 |
|
|
|
|
|
|
|
|
|
|
|
|
110 |
115 |
120 |
125 |
132 |
150 |
| 径 Richtung Sprung Verzerrung |
37 |
52 |
75 |
105 |
150 |
210 |
52 |
75 |
105 |
150 |
210 |
300 |
75 |
105 |
150 |
210 |
300 |
430 |
| 6 |
Nähe 距差 |
|
|
|
|
|
|
|
|
|
|
|
|
210 |
220 |
240 |
250 |
270 |
290 |
| 径 Richtung Sprung Verzerrung |
56 |
79 |
110 |
160 |
230 |
320 |
79 |
110 |
160 |
230 |
320 |
450 |
110 |
160 |
230 |
320 |
450 |
640 |
| Wie hoch? |
偏 差 |
端面模数 |
| 2.5 ¥4 ¥Rad |
4 ′′ 6 ′′ Räder |
6'10's' 轮 |
| 节圆直径 ((mm) |
| 超过12到25以下 |
超过25到50以下 |
超过50到100以下 |
Über 100 bis 20 Jahre |
Über 200 bis 400 |
超过400到8000以下 |
Über 800 bis 1600 |
超过25到50以下 |
超过50到100以下 |
超过100到200以下 |
Über 200 bis 400 |
Über 400 bis 800 |
Über 800 bis 1600 |
超过25到50以下 |
超过50到100以下 |
超过100到200以下 |
Über 200 bis 400 |
Über 400 bis 800 |
Über 800 bis 1600 |
| 0 |
单 距偏差 (±) |
5 |
5 |
5 |
6 |
6 |
7 |
8 |
5 |
6 |
6 |
7 |
7 |
8 |
6 |
6 |
7 |
7 |
8 |
9 |
| Nähe 距差 |
6 |
6 |
7 |
7 |
8 |
9 |
10 |
7 |
7 |
8 |
9 |
9 |
11 |
8 |
8 |
9 |
9 |
10 |
11 |
| ¥ Abstandsdifferenz (±) |
18 |
19 |
21 |
22 |
24 |
27 |
31 |
21 |
22 |
24 |
26 |
29 |
32 |
24 |
25 |
27 |
29 |
32 |
35 |
| 径 Richtung Sprung Verzerrung |
10 |
14 |
20 |
28 |
40 |
56 |
79 |
14 |
20 |
28 |
40 |
56 |
79 |
14 |
20 |
28 |
40 |
56 |
79 |
| 1 |
单 距偏差 (±) |
8 |
8 |
9 |
10 |
10 |
12 |
13 |
9 |
10 |
10 |
11 |
12 |
14 |
10 |
11 |
11 |
12 |
13 |
15 |
| Nähe 距差 |
10 |
11 |
12 |
12 |
14 |
15 |
17 |
12 |
12 |
13 |
14 |
16 |
18 |
13 |
14 |
15 |
16 |
17 |
19 |
| ¥ Abstandsdifferenz (±) |
32 |
33 |
36 |
38 |
42 |
46 |
51 |
36 |
38 |
41 |
45 |
49 |
54 |
41 |
43 |
46 |
49 |
54 |
59 |
| 径 Richtung Sprung Verzerrung |
15 |
21 |
30 |
43 |
60 |
86 |
120 |
21 |
30 |
43 |
60 |
86 |
120 |
21 |
30 |
43 |
60 |
86 |
120 |
| 2 |
单 距偏差 (±) |
14 |
15 |
16 |
17 |
18 |
20 |
22 |
16 |
17 |
18 |
19 |
21 |
23 |
18 |
19 |
20 |
21 |
23 |
25 |
| Nähe 距差 |
18 |
19 |
20 |
22 |
24 |
26 |
29 |
21 |
22 |
23 |
25 |
27 |
30 |
23 |
24 |
26 |
27 |
30 |
32 |
| ¥ Abstandsdifferenz (±) |
57 |
59 |
63 |
67 |
72 |
79 |
88 |
64 |
67 |
72 |
77 |
84 |
92 |
71 |
75 |
79 |
84 |
91 |
100 |
| 径 Richtung Sprung Verzerrung |
22 |
31 |
45 |
63 |
89 |
125 |
180 |
31 |
45 |
63 |
89 |
125 |
180 |
31 |
45 |
63 |
89 |
125 |
180 |
| 3 |
单 距偏差 (±) |
25 |
27 |
28 |
30 |
32 |
35 |
38 |
28 |
30 |
31 |
34 |
36 |
40 |
31 |
33 |
34 |
37 |
39 |
43 |
| Nähe 距差 |
33 |
34 |
36 |
39 |
41 |
45 |
49 |
37 |
39 |
41 |
44 |
47 |
52 |
41 |
42 |
45 |
48 |
51 |
56 |
| ¥ Abstandsdifferenz (±) |
100 |
105 |
110 |
120 |
130 |
140 |
150 |
115 |
120 |
125 |
135 |
145 |
160 |
125 |
130 |
140 |
145 |
155 |
170 |
| 径 Richtung Sprung Verzerrung |
33 |
48 |
67 |
95 |
135 |
190 |
270 |
48 |
67 |
95 |
135 |
190 |
270 |
48 |
67 |
95 |
135 |
190 |
270 |
| 4 |
单 距偏差 (±) |
45 |
47 |
50 |
52 |
55 |
59 |
65 |
50 |
52 |
54 |
58 |
62 |
68 |
54 |
56 |
59 |
62 |
67 |
72 |
| Nähe 距差 |
59 |
61 |
65 |
67 |
72 |
77 |
84 |
65 |
67 |
71 |
75 |
81 |
88 |
71 |
73 |
77 |
81 |
87 |
100 |
| ¥ Abstandsdifferenz (±) |
180 |
185 |
200 |
210 |
220 |
240 |
260 |
200 |
210 |
220 |
230 |
250 |
270 |
220 |
230 |
240 |
250 |
270 |
290 |
| 径 Richtung Sprung Verzerrung |
50 |
71 |
100 |
145 |
200 |
290 |
400 |
71 |
100 |
145 |
200 |
290 |
400 |
71 |
100 |
145 |
200 |
290 |
400 |
| 5 |
Nähe 距差 |
115 |
120 |
125 |
130 |
135 |
155 |
170 |
125 |
130 |
135 |
150 |
165 |
175 |
135 |
140 |
155 |
165 |
175 |
185 |
| 径 Richtung Sprung Verzerrung |
75 |
105 |
150 |
210 |
300 |
430 |
600 |
105 |
150 |
210 |
300 |
430 |
600 |
105 |
150 |
210 |
300 |
430 |
600 |
| 6 |
Nähe 距差 |
220 |
240 |
250 |
260 |
280 |
290 |
310 |
250 |
260 |
270 |
290 |
300 |
330 |
270 |
280 |
290 |
310 |
320 |
340 |
| 径 Richtung Sprung Verzerrung |
110 |
160 |
230 |
320 |
450 |
640 |
900 |
160 |
230 |
320 |
450 |
640 |
900 |
160 |
230 |
320 |
450 |
640 |
900 |
| 7 |
径 Richtung Sprung Verzerrung |
250 |
360 |
500 |
720 |
1000 |
1450 |
2000 |
360 |
500 |
720 |
1000 |
1450 |
2000 |
360 |
500 |
720 |
1000 |
1450 |
2000 |

DINGSCO
Wir sind die Produktion R & D-Basis spezialisiert auf professionelle Design, resech, Herstellung und Verkauf von hochwertigen kleinen Modul Spiral Schräggetriebe und hohe Reduktion hypoid Getriebe und zylindrische Getriebe. We have strong scientific research and development capabilities and is also equipped a full set of advanced equipment including seven-axis five-linkage CNC spiral bevel gear grinding machines and gear milling machinesDurch die optimale Nutzung der wissenschaftlichen und technologischen Errungenschaften und Ausrüstung des Gear Research Institute der Central South University, der mechanischen Verarbeitung, der Wärmebehandlung und der Prüfung.Wir haben qualitativ hochwertige Produkte mit hoher Reduktion entwickelt, hohe Geschwindigkeit, hohe Last, geringer Lärm und weniger Zähne für die Benutzer.
Nicht-standardmäßige Anpassung von Dinghan Zahnrädern, unser Unternehmen hat eine vollständige Reihe von Software, um digitale Fertigung von Spiral-Kegel-Gängen zu realisieren, Funktionen wie Gängendesign,Stärkeberechnung, Kontaktanalyse, Werkzeugberechnung, Zahnprofilfehlerumkehrung usw. können realisiert werden.spiralförmige Neigung ((SFT) Methode & hypoide Neigung (HFT) Methode des Cycloid Equidep, usw.

 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!